above the cloud
categories: physical computing, interactive installation, coding, fabrication, mechanics
tools: Arduino, IR sensor, servo, NeoPixels, wood work
collaborator: Yuanyuan Wang
what is this project about
Do you want to connect with the alien? Above the Cloud is an interactive installation which user can encounter a cute alien living in the cloud. User wears an alien communication device on a finger, and the passcode to meet the alien is to simply point your finger towards the sky.
creative process
sketch
This is a sketch of our very first idea of this installation. Creature-like aliens are hanging down from the ceiling. When user reaches their hand towards aliens, aliens would move up and down or escape away.

creature-like objects hanging down from ceiling
prototype 1
When user reaches their hands close to the alien, aliens would move. We created 3 types of aliens and each has different movement:
1 move horizontally
2 move up and down
3 move up and escape away
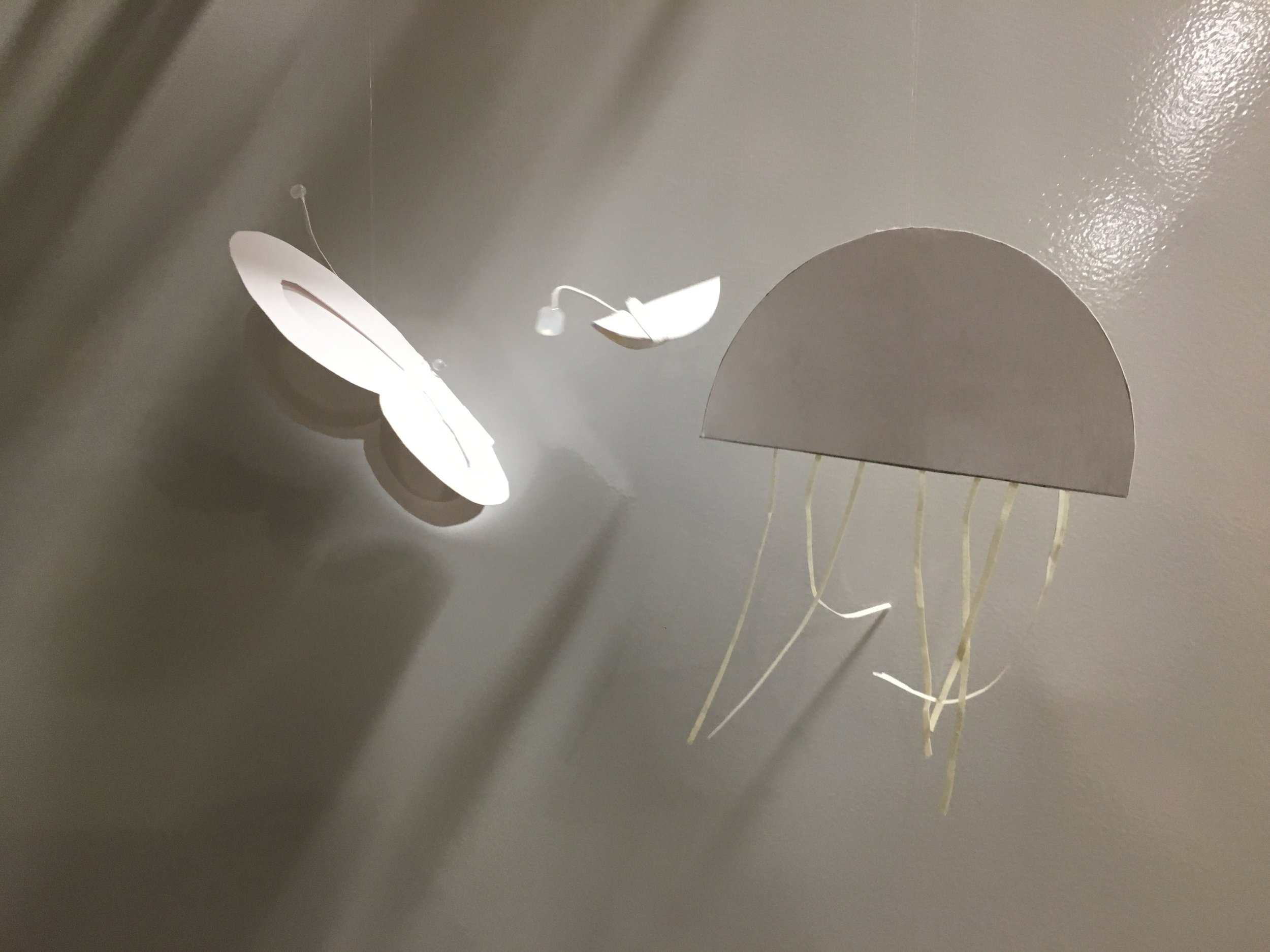
paper prototype of aliens
playtest
Based on user playtest using our paper prototype, we noticed these issues:
Users tended to touch or grab the alien rather than keeping a slight distance from them.
Some users wanted to blow aliens.
Aliens’ height was too low, so users can catch them.
User felt aliens were not friendly because aliens flee away when they reach their hands up.
Fishing lines got tangled easily.
modification
We changed the interactive gesture. User now lies down during the experience, so it would be difficult to grab the aliens, since users are limited by their arm length.
We refined the environment that user will be in. They would lie on the cloud, and reach towards the universe. This helps establish aliens’ identity since they would move down from the universe.

prototype 2
We prototyped how one alien could move up and down. We built a structure that can hang alien from above, and the stepper hides behind the spool.
We used an IR sensor and an IR emitter to connect human with the alien. The IR sensor is hidden in the alien, and the IR emitter is on user’s finger hand.
When the IR beam is in line (human and alien connected), alien moves down. When the IR beam is broken (human and alien disconnected), alien moves back up.

prototype 2 sketch

wire diagram
The fabrication was way more difficult than we expected. We encountered these problems:
The stepper does not have enough torque to support pulley’s weight. It can only spin horizontally not vertically.
Pulley was junk hacked from a spool, so it does not fit perfectly on stepper’s shaft. We realized for this kind of mechanics, we need perfectly fit engineered parts.
Wire was too stiff to coil up onto the spool.
playstest 2
The user interaction was much more controlled compared to the first playtest, which is good. There is no grabbing the alien anymore.
more production in electronics, fabrication, and mechanics
Changed to 12V NEMA stepper and plugged in 12V power
Changed our mechanical structure (using a wood arm and pulley)
changed to a softer and more flexible wire
We switched from stepper to servo because we still did not have luck with the stepper + wood arm combination. The electronics was working perfect, but our parts did not fit well. We tried multiple ways to attach the wood arm with stepper. We did not have enough time to buy a 5mm hub, and we only had a 6mm hub at hand. The wood and the axle has either too much friction (so it does not move) or too loose that it falls out.

modified mechanical structure

testing pulley with new flexible wire
We planned to use a bean bag and turned it into a cloud. Due to our limited budget and time, we moved our cloud to ceiling. User stands on the floor. Alien comes out from the cloud when user points the alien communication device (finger hand) to the cloud.
We used grey balloons to make the cloud. We also added NeoPixels to make cloud change color when alien comes out to give magical feeling. We used a hexagon wood structure inside to support balloons and LEDs.
testing servo. YAY it works!

wood hexagon structure with wood glue and twine